
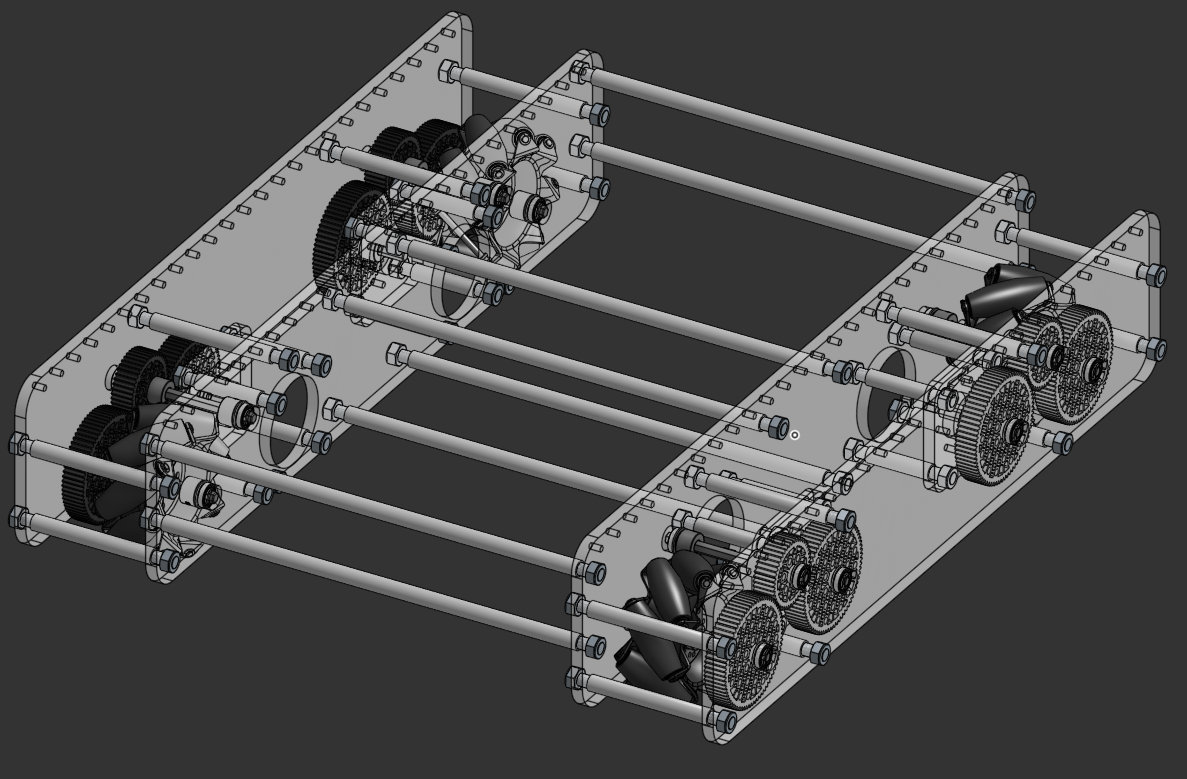
Offseason Drivetrain
By: Nick
Team Number: 0

REV Robotics low profile motor end cap
By: Adam Rodrigues
Team Number: 21196
FIRST Slovenia standard drivetrain
By: FIRST Slovenia
Team Number: 22903
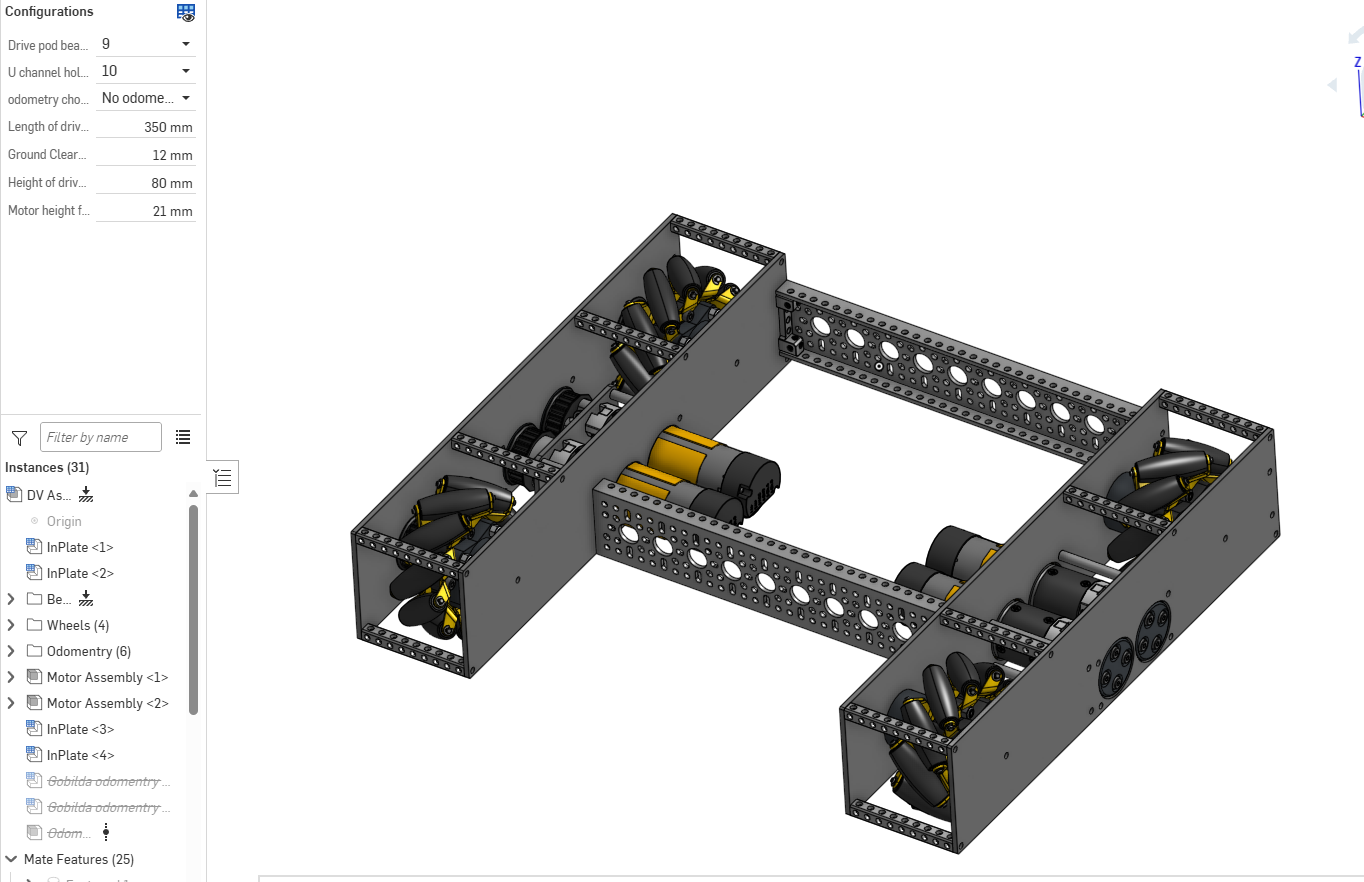
Benji's Configerable Drivetrain
By: Benji
Team Number: 5064
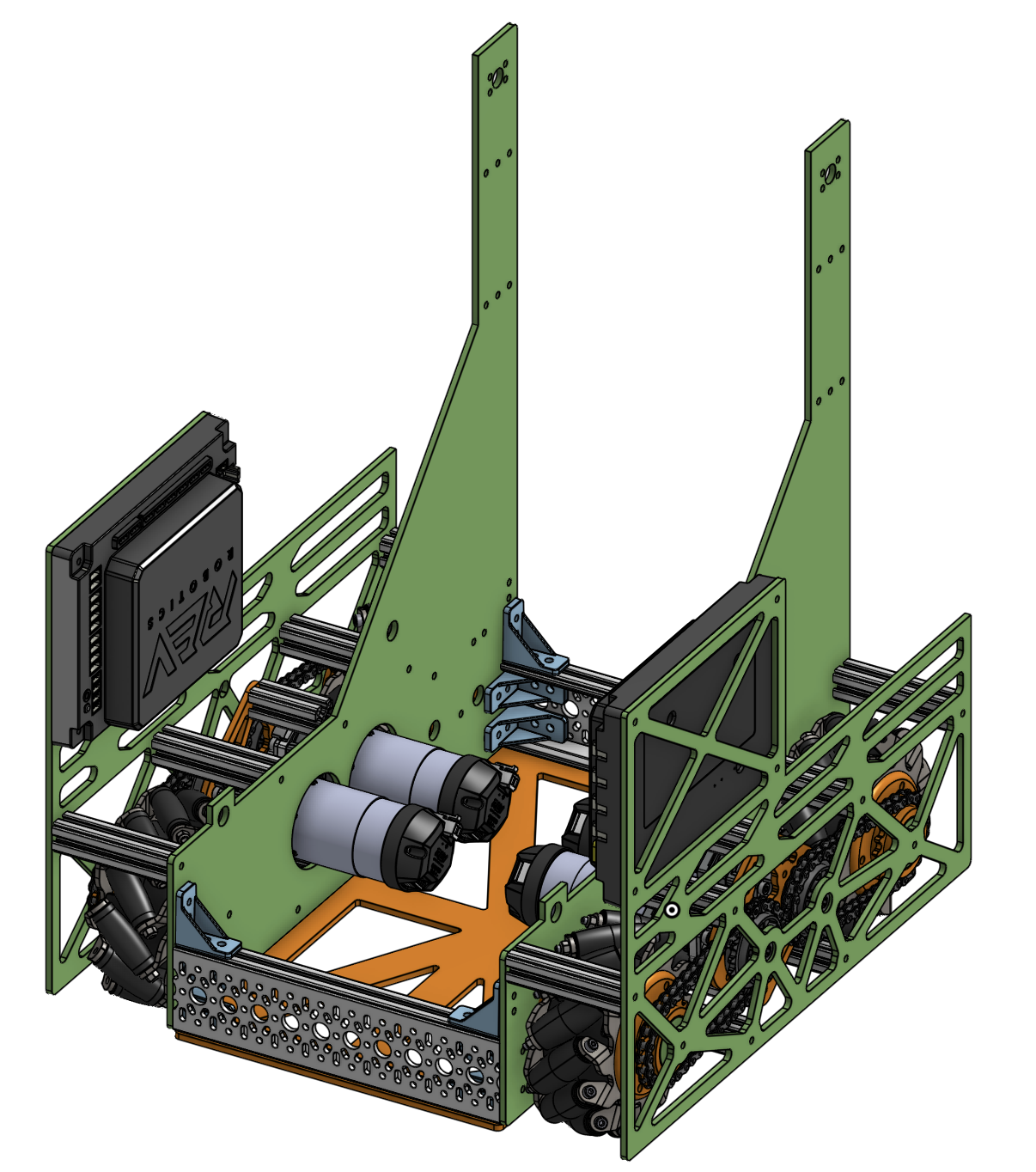
Chained Drivetrain-TecRa BOT
By: TecRa BOT
Team Number: 21573